LeetCode Python, Java, C++ > 图论 > 797. 所有可能的路径 > 已支持 Python, Java, C++, JavaScript, C#, Go, Ruby > LeetCode GitHub Code 或 转发
力扣链接:797. 所有可能的路径,难度等级:中等。
给你一个有 n 个节点的 有向无环图(DAG),请你找出所有从节点 0 到节点 n-1 的路径并输出(不要求按特定顺序)
graph[i] 是一个从节点 i 可以访问的所有节点的列表(即从节点 i 到节点 graph[i][j] 存在一条有向边)。
示例 1:

输入: graph = [[1,2],[3],[3],[]]
输出: [[0,1,3],[0,2,3]]
解释: 有两条路径 0 -> 1 -> 3 和 0 -> 2 -> 3
示例 2:
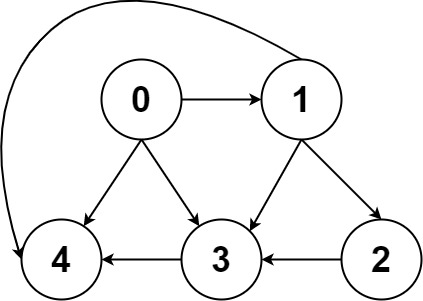
输入: graph = [[4,3,1],[3,2,4],[3],[4],[]]
输出: [[0,4],[0,3,4],[0,1,3,4],[0,1,2,3,4],[0,1,4]]
约束:
n == graph.length2 <= n <= 150 <= graph[i][j] < ngraph[i][j] != i(即不存在自环)graph[i]中的所有元素 互不相同- 保证输入为 有向无环图(DAG)
“深度优先搜索”的模式
深度优先搜索(DFS)是一种经典的图遍历算法,其核心特点是“尽可能深”地探索图的分支。DFS 从起始顶点出发,沿着一条路径不断深入,直到到达没有未访问邻接点的顶点,然后回溯到最近的分叉点继续探索。这一过程通过递归或显式栈(迭代法)实现,形成“后进先出”的搜索顺序,因此 DFS 在非加权图中能快速找到离起点较远的深层节点。
与 BFS 的对比:
- 搜索顺序:DFS 优先探索深度方向,而广度优先搜索(BFS)按层逐层扩展,形成“先进先出”的队列结构。
- 适用场景:DFS 更适合强连通分量或回溯类问题(如迷宫所有路径),而 BFS 擅长最短路径(未加权图)或邻近节点探索(如社交网络好友推荐)。
DFS 的独特性:
- 不完全性:若图无限深或存在环路(未标记已访问),DFS 可能无法终止,而 BFS 总能找到最短路径(未加权图)。
- “一支笔走到底” 的搜索风格,使其在回溯剪枝或记录路径时更具灵活性,但也可能错过近邻最优解。
总之,DFS 以深度优先的策略揭示图的纵向结构,其回溯特性与栈的天然结合,使其在路径记录和状态空间探索中表现突出,但需注意处理环路和最优解缺失的局限性。
步骤
- 初始化一个空列表
paths,用于存储所有找到的有效路径。 - 初始化一个堆栈来管理 DFS 遍历。堆栈中的每个元素将存储一个 pair(或元组),其中包含当前
node和到达该节点所采用的path。 - 将起始状态加入到堆栈:初始节点
0和一个空的路径列表(例如(0, []))。 - 当堆栈不为空时:
- 从堆栈中弹出顶部元素,检索当前
node及其关联的path。 - 通过将当前
node附加到从堆栈中弹出的path来创建一个currentPath数组,它表示通往当前节点并包含当前节点的路径。 - 检查当前
node是否为目标节点(n - 1,其中n是节点总数)。- 如果它是目标节点,则将
currentPath添加到paths数组中,因为已经找到了从源节点到目标节点的完整路径。 - 如果不是目标节点,则遍历当前
node可访问的所有neighbor节点(即遍历graph[node])。- 对于每个
neighbor,将一个新的 pair(neighbor节点和currentPath)加入到堆栈中。这为遍历探索从邻居节点延伸的路径做好准备。
- 对于每个
- 如果它是目标节点,则将
- 从堆栈中弹出顶部元素,检索当前
- 循环结束后(堆栈为空),返回
paths数组,其中包含从节点0到节点n - 1的所有已发现路径。
复杂度
时间复杂度
Too complex
空间复杂度
Too complex
Python #
class Solution:
def allPathsSourceTarget(self, graph: List[List[int]]) -> List[List[int]]:
paths = []
stack = [(0, [])]
while stack:
node, path = stack.pop()
if node == len(graph) - 1:
paths.append(path + [node])
continue
for target_node in graph[node]:
stack.append((target_node, path + [node]))
return paths
Java #
class Solution {
public List<List<Integer>> allPathsSourceTarget(int[][] graph) {
List<List<Integer>> paths = new ArrayList<>();
// Each element in the stack is a pair: (current_node, current_path)
Stack<Pair<Integer, List<Integer>>> stack = new Stack<>();
List<Integer> initialPath = new ArrayList<>();
stack.push(new Pair<>(0, initialPath));
int targetNode = graph.length - 1;
while (!stack.isEmpty()) {
var current = stack.pop();
int node = current.getKey();
var path = current.getValue();
var nextPath = new ArrayList<>(path);
nextPath.add(node);
if (node == targetNode) {
paths.add(nextPath);
continue;
}
for (int neighbor : graph[node]) {
stack.push(new Pair<>(neighbor, nextPath));
}
}
return paths;
}
}
C++ #
class Solution {
public:
vector<vector<int>> allPathsSourceTarget(vector<vector<int>>& graph) {
vector<vector<int>> paths;
// Stack stores pairs of (current_node, current_path)
stack<pair<int, vector<int>>> s;
s.push({0, {}}); // Start at node 0 with an empty path initially
int targetNode = graph.size() - 1;
while (!s.empty()) {
auto node_path = s.top();
s.pop();
int node = node_path.first;
vector<int> path = node_path.second;
// Add the current node to the path
path.push_back(node);
if (node == targetNode) {
paths.push_back(path); // Found a path to the target
continue;
}
// Explore neighbors
for (int neighbor : graph[node]) {
s.push({neighbor, path});
}
}
return paths;
}
};
JavaScript #
/**
* @param {number[][]} graph
* @return {number[][]}
*/
var allPathsSourceTarget = function(graph) {
const paths = [];
// Stack stores arrays: [current_node, current_path]
const stack = [[0, []]]; // Start at node 0 with an empty path
const targetNode = graph.length - 1;
while (stack.length > 0) {
const [node, path] = stack.pop();
// Create the new path by appending the current node
const currentPath = [...path, node];
if (node === targetNode) {
paths.push(currentPath); // Found a path
continue;
}
// Explore neighbors
for (const neighbor of graph[node]) {
stack.push([neighbor, currentPath]); // Push neighbor and the path so far
}
}
return paths;
};
C# #
public class Solution {
public IList<IList<int>> AllPathsSourceTarget(int[][] graph)
{
var paths = new List<IList<int>>();
// Stack stores tuples: (current_node, current_path)
var stack = new Stack<(int node, List<int> path)>();
stack.Push((0, new List<int>())); // Start at node 0
int targetNode = graph.Length - 1;
while (stack.Count > 0)
{
var (node, path) = stack.Pop();
var currentPath = new List<int>(path);
currentPath.Add(node);
if (node == targetNode)
{
paths.Add(currentPath); // Found a path
continue;
}
// Explore neighbors
foreach (int neighbor in graph[node])
{
stack.Push((neighbor, currentPath)); // Push neighbor and the path so far
}
}
return paths;
}
}
Go #
type StackItem struct {
Node int
Path []int
}
func allPathsSourceTarget(graph [][]int) [][]int {
var paths [][]int
stack := []StackItem{{Node: 0, Path: []int{}}} // Start at node 0
targetNode := len(graph) - 1
for len(stack) > 0 {
currentItem := stack[len(stack) - 1] // Pop from stack
stack = stack[:len(stack) - 1]
node := currentItem.Node
path := currentItem.Path
newPath := append([]int(nil), path...)
newPath = append(newPath, node)
if node == targetNode {
paths = append(paths, newPath) // Found a path
continue
}
for _, neighbor := range graph[node] {
stack = append(stack, StackItem{Node: neighbor, Path: newPath})
}
}
return paths
}
Ruby #
# @param {Integer[][]} graph
# @return {Integer[][]}
def all_paths_source_target(graph)
paths = []
# Stack stores arrays: [current_node, current_path]
stack = [[0, []]] # Start at node 0 with an empty path
target_node = graph.length - 1
while !stack.empty?
node, path = stack.pop
# Create the new path by appending the current node
current_path = path + [node]
if node == target_node
paths << current_path # Found a path
next
end
# Explore neighbors
graph[node].each do |neighbor|
stack.push([neighbor, current_path])
end
end
paths
end
其它语言
欢迎贡献代码到 LeetCode Python GitHub -> 797. 所有可能的路径。感谢!题解2的思路:用“递归”实现的“深度优先搜索”
“深度优先搜索”的模式
深度优先搜索(DFS)是一种经典的图遍历算法,其核心特点是“尽可能深”地探索图的分支。DFS 从起始顶点出发,沿着一条路径不断深入,直到到达没有未访问邻接点的顶点,然后回溯到最近的分叉点继续探索。这一过程通过递归或显式栈(迭代法)实现,形成“后进先出”的搜索顺序,因此 DFS 在非加权图中能快速找到离起点较远的深层节点。
与 BFS 的对比:
- 搜索顺序:DFS 优先探索深度方向,而广度优先搜索(BFS)按层逐层扩展,形成“先进先出”的队列结构。
- 适用场景:DFS 更适合强连通分量或回溯类问题(如迷宫所有路径),而 BFS 擅长最短路径(未加权图)或邻近节点探索(如社交网络好友推荐)。
DFS 的独特性:
- 不完全性:若图无限深或存在环路(未标记已访问),DFS 可能无法终止,而 BFS 总能找到最短路径(未加权图)。
- “一支笔走到底” 的搜索风格,使其在回溯剪枝或记录路径时更具灵活性,但也可能错过近邻最优解。
总之,DFS 以深度优先的策略揭示图的纵向结构,其回溯特性与栈的天然结合,使其在路径记录和状态空间探索中表现突出,但需注意处理环路和最优解缺失的局限性。
“递归”的模式
递归(Recursion)是计算机科学和数学中的一个重要概念,指的是 一个函数在其定义中 直接或间接调用自身 的方法。
递归的核心思想
- 自我调用:函数在执行过程中调用自身。
- 基线情况:相当于终止条件。到达基线情况后,就可以返回结果了,不需要再递归调用,防止无限循环。
- 递归步骤:问题逐步向“基线情况”靠近的步骤。
步骤
- 初始化一个空数组
paths,用于存储从源节点到目标节点找到的所有有效路径。 - 定义一个递归深度优先搜索 (DFS) 函数,例如
dfs,它将当前node和path(即迄今为止访问过的节点列表,用于到达当前节点)作为输入。 - 在
dfs函数内部:- 通过将当前
node附加到path来创建一个新的路径列表。我们将其称为newPath。 - 检查当前
node是否为目标节点(n - 1,其中n是节点总数)。- 如果是目标节点,则表示我们找到了一条完整的路径。将
newPath添加到主paths数组中,并从此递归调用返回。
- 如果是目标节点,则表示我们找到了一条完整的路径。将
- 如果当前
node不是目标节点,则遍历所有可从当前node访问的neighbor节点(即遍历graph[node])。- 对于每个
neighbor,以neighbor作为新的当前节点,以newPath作为到达该节点的路径,对dfs进行递归调用 (dfs(neighbor, newPath))。
- 对于每个
- 通过将当前
- 通过使用源节点
0和空的初始路径 (dfs(0, [])) 调用dfs函数来启动该过程。 - 初始
dfs调用完成后,返回包含所有已发现路径的paths数组。
复杂度
时间复杂度
Too complex
空间复杂度
Too complex
Python #
class Solution:
def allPathsSourceTarget(self, graph: List[List[int]]) -> List[List[int]]:
self.paths = []
self.graph = graph
self.target = len(graph) - 1
self.dfs(0, []) # Start DFS from node 0 with an empty initial path
return self.paths
def dfs(self, node, path):
current_path = path + [node]
if node == self.target: # Base case
self.paths.append(current_path)
return
for neighbor in self.graph[node]: # Recursive step: Explore neighbors
self.dfs(neighbor, current_path)
Java #
class Solution {
private List<List<Integer>> paths;
private int[][] graph;
private int targetNode;
public List<List<Integer>> allPathsSourceTarget(int[][] graph) {
this.paths = new ArrayList<>();
this.graph = graph;
this.targetNode = graph.length - 1;
List<Integer> initialPath = new ArrayList<>();
dfs(0, initialPath); // Start DFS from node 0 with an empty initial path
return paths;
}
private void dfs(int node, List<Integer> currentPath) {
List<Integer> newPath = new ArrayList<>(currentPath);
newPath.add(node);
if (node == targetNode) { // Base case
paths.add(newPath);
return;
}
for (int neighbor : graph[node]) { // Recursive step: Explore neighbors
dfs(neighbor, newPath);
}
}
}
C++ #
class Solution {
public:
vector<vector<int>> allPathsSourceTarget(vector<vector<int>>& graph) {
_graph = graph;
vector<int> initial_path; // Empty initial path
dfs(0, initial_path); // Start DFS from node 0
return _paths;
}
private:
vector<vector<int>> _paths;
vector<vector<int>> _graph;
void dfs(int node, vector<int> current_path) {
current_path.push_back(node);
if (node == _graph.size() - 1) { // Base case
_paths.push_back(current_path);
return;
}
for (int neighbor : _graph[node]) { // Recursive step: Explore neighbors
dfs(neighbor, current_path);
}
}
};
JavaScript #
let paths
let graph
var allPathsSourceTarget = function (graph_) {
paths = []
graph = graph_
dfs(0, [])
return paths
}
function dfs(node, currentPath) {
const newPath = [...currentPath, node]
if (node === graph.length - 1) { // Base case
paths.push(newPath)
return
}
for (const neighbor of graph[node]) { // Recursive step: Explore neighbors
dfs(neighbor, newPath)
}
}
C# #
public class Solution
{
private IList<IList<int>> paths;
private int[][] graph;
private int targetNode;
public IList<IList<int>> AllPathsSourceTarget(int[][] graph)
{
this.paths = new List<IList<int>>();
this.graph = graph;
this.targetNode = graph.Length - 1;
Dfs(0, new List<int>());
return paths;
}
private void Dfs(int node, List<int> currentPath)
{
var newPath = new List<int>(currentPath);
newPath.Add(node);
if (node == targetNode) // Base case
{
paths.Add(newPath);
return;
}
foreach (int neighbor in graph[node]) // Recursive step: Explore neighbors
{
Dfs(neighbor, newPath);
}
}
}
Go #
var (
paths [][]int
graph [][]int
targetNode int
)
func allPathsSourceTarget(graph_ [][]int) [][]int {
paths = [][]int{}
graph = graph_
targetNode = len(graph) - 1
dfs(0, []int{})
return paths
}
func dfs(node int, currentPath []int) {
newPath := append([]int(nil), currentPath...)
newPath = append(newPath, node)
if node == targetNode { // Base case
paths = append(paths, newPath)
return
}
for _, neighbor := range graph[node] { // Recursive step: Explore neighbors
dfs(neighbor, newPath)
}
}
Ruby #
def all_paths_source_target(graph)
@paths = []
@graph = graph
dfs(0, [])
@paths
end
def dfs(node, current_path)
new_path = current_path + [node]
if node == @graph.size - 1 # Base case
@paths << new_path
return
end
@graph[node].each do |neighbor| # Recursive step: Explore neighbors
dfs(neighbor, new_path)
end
end
其它语言
欢迎贡献代码到 LeetCode Python GitHub -> 797. 所有可能的路径。感谢!题解3的思路:用“递归”实现的“深度优先搜索”(推荐)
“深度优先搜索”的模式
深度优先搜索(DFS)是一种经典的图遍历算法,其核心特点是“尽可能深”地探索图的分支。DFS 从起始顶点出发,沿着一条路径不断深入,直到到达没有未访问邻接点的顶点,然后回溯到最近的分叉点继续探索。这一过程通过递归或显式栈(迭代法)实现,形成“后进先出”的搜索顺序,因此 DFS 在非加权图中能快速找到离起点较远的深层节点。
与 BFS 的对比:
- 搜索顺序:DFS 优先探索深度方向,而广度优先搜索(BFS)按层逐层扩展,形成“先进先出”的队列结构。
- 适用场景:DFS 更适合强连通分量或回溯类问题(如迷宫所有路径),而 BFS 擅长最短路径(未加权图)或邻近节点探索(如社交网络好友推荐)。
DFS 的独特性:
- 不完全性:若图无限深或存在环路(未标记已访问),DFS 可能无法终止,而 BFS 总能找到最短路径(未加权图)。
- “一支笔走到底” 的搜索风格,使其在回溯剪枝或记录路径时更具灵活性,但也可能错过近邻最优解。
总之,DFS 以深度优先的策略揭示图的纵向结构,其回溯特性与栈的天然结合,使其在路径记录和状态空间探索中表现突出,但需注意处理环路和最优解缺失的局限性。
步骤
- 初始化一个空列表
paths,用于存储从源节点到目标节点找到的所有有效路径。 - 创建一个可变列表
path,用于跟踪当前正在探索的路径,初始仅包含源节点0。 - 实现一个使用回溯法探索路径的递归 DFS 函数:
- 基线情况:如果当前节点是目标节点 (
n-1),则复制当前路径并将其添加到paths列表中。 - 递归步骤:对于当前节点的每个邻居:
- 将邻居添加到当前路径。
- 使用此邻居递归调用 DFS 函数。
- 递归调用返回后,从路径中删除邻居(回溯)。
- 基线情况:如果当前节点是目标节点 (
- 从源节点
0开始 DFS。 - DFS 完成后,返回收集到的
paths。
复杂度
时间复杂度
Too complex
空间复杂度
Too complex
Python #
class Solution:
def allPathsSourceTarget(self, graph: List[List[int]]) -> List[List[int]]:
self.paths = []
self.graph = graph
self.path = [0] # Important
self.dfs(0)
return self.paths
def dfs(self, node):
if node == len(self.graph) - 1:
self.paths.append(self.path.copy()) # Important
return
for neighbor in self.graph[node]:
self.path.append(neighbor) # Important
self.dfs(neighbor)
self.path.pop() # Important
Java #
class Solution {
private List<List<Integer>> paths = new ArrayList<>();
private List<Integer> path = new ArrayList<>(List.of(0)); // Important - start with node 0
private int[][] graph;
public List<List<Integer>> allPathsSourceTarget(int[][] graph) {
this.graph = graph;
dfs(0);
return paths;
}
private void dfs(int node) {
if (node == graph.length - 1) { // Base case
paths.add(new ArrayList<>(path)); // Important - make a copy
return;
}
for (int neighbor : graph[node]) { // Recursive step
path.add(neighbor); // Important
dfs(neighbor);
path.remove(path.size() - 1); // Important - backtrack
}
}
}
C++ #
class Solution {
public:
vector<vector<int>> allPathsSourceTarget(vector<vector<int>>& graph) {
_graph = graph;
_path = {0}; // Important - start with node 0
dfs(0);
return _paths;
}
private:
vector<vector<int>> _paths;
vector<vector<int>> _graph;
vector<int> _path;
void dfs(int node) {
if (node == _graph.size() - 1) { // Base case
_paths.push_back(_path); // Important - copy is made automatically
return;
}
for (int neighbor : _graph[node]) { // Recursive step
_path.push_back(neighbor); // Important
dfs(neighbor);
_path.pop_back(); // Important - backtrack
}
}
};
JavaScript #
/**
* @param {number[][]} graph
* @return {number[][]}
*/
var allPathsSourceTarget = function(graph) {
const paths = [];
const path = [0]; // Important - start with node 0
function dfs(node) {
if (node === graph.length - 1) { // Base case
paths.push([...path]); // Important - make a copy
return;
}
for (const neighbor of graph[node]) { // Recursive step
path.push(neighbor); // Important
dfs(neighbor);
path.pop(); // Important - backtrack
}
}
dfs(0);
return paths;
};
C# #
public class Solution
{
private IList<IList<int>> paths = new List<IList<int>>();
private List<int> path = new List<int> { 0 }; // Important - start with node 0
private int[][] graph;
public IList<IList<int>> AllPathsSourceTarget(int[][] graph)
{
this.graph = graph;
Dfs(0);
return paths;
}
private void Dfs(int node)
{
if (node == graph.Length - 1)
{ // Base case
paths.Add(new List<int>(path)); // Important - make a copy
return;
}
foreach (int neighbor in graph[node])
{ // Recursive step
path.Add(neighbor); // Important
Dfs(neighbor);
path.RemoveAt(path.Count - 1); // Important - backtrack
}
}
}
Go #
func allPathsSourceTarget(graph [][]int) [][]int {
paths := [][]int{}
path := []int{0} // Important - start with node 0
var dfs func(int)
dfs = func(node int) {
if node == len(graph) - 1 { // Base case
// Important - make a deep copy of the path
paths = append(paths, append([]int(nil), path...))
return
}
for _, neighbor := range graph[node] { // Recursive step
path = append(path, neighbor) // Important
dfs(neighbor)
path = path[:len(path) - 1] // Important - backtrack
}
}
dfs(0)
return paths
}
Ruby #
# @param {Integer[][]} graph
# @return {Integer[][]}
def all_paths_source_target(graph)
@paths = []
@graph = graph
@path = [0] # Important - start with node 0
dfs(0)
@paths
end
def dfs(node)
if node == @graph.length - 1 # Base case
@paths << @path.clone # Important - make a copy
return
end
@graph[node].each do |neighbor| # Recursive step
@path << neighbor # Important
dfs(neighbor)
@path.pop # Important - backtrack
end
end